Sim-to-real transferable assembly skills over diverse geometries
Imitation-augmented RL and specialist-to-generalist training for plug-and-socket assembly with hardware deployment.

Problem
High-mix, low-volume manufacturing needs robots that adapt to many part geometries, poses, and environments while keeping insertion precision. Pure reinforcement learning often fails to cover broad assembly diversity, collecting human assembly demonstrations is expensive, and closing the sim-to-real gap at scale remains difficult without a disciplined perception and control stack on the real robot.
Solution
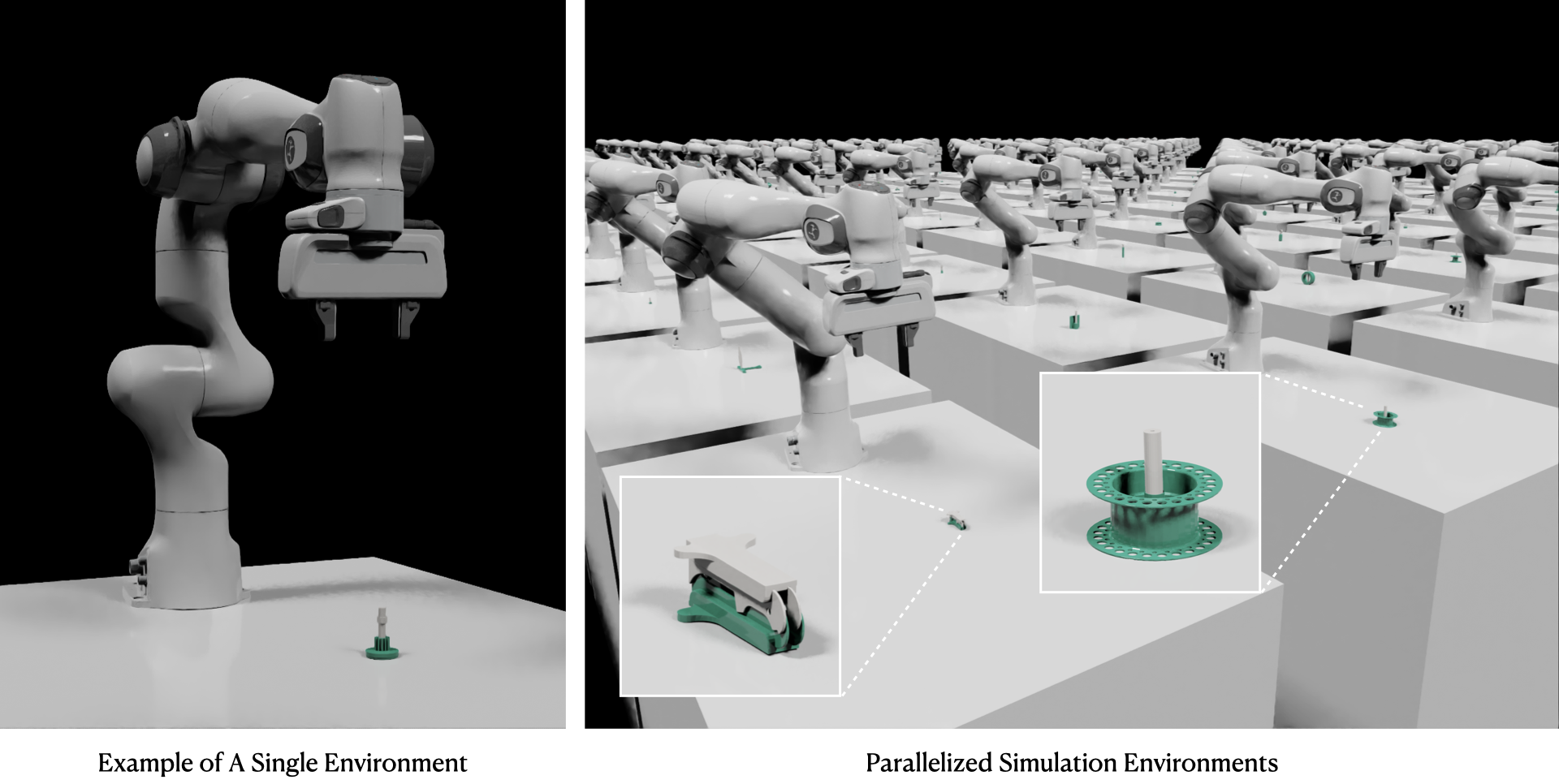
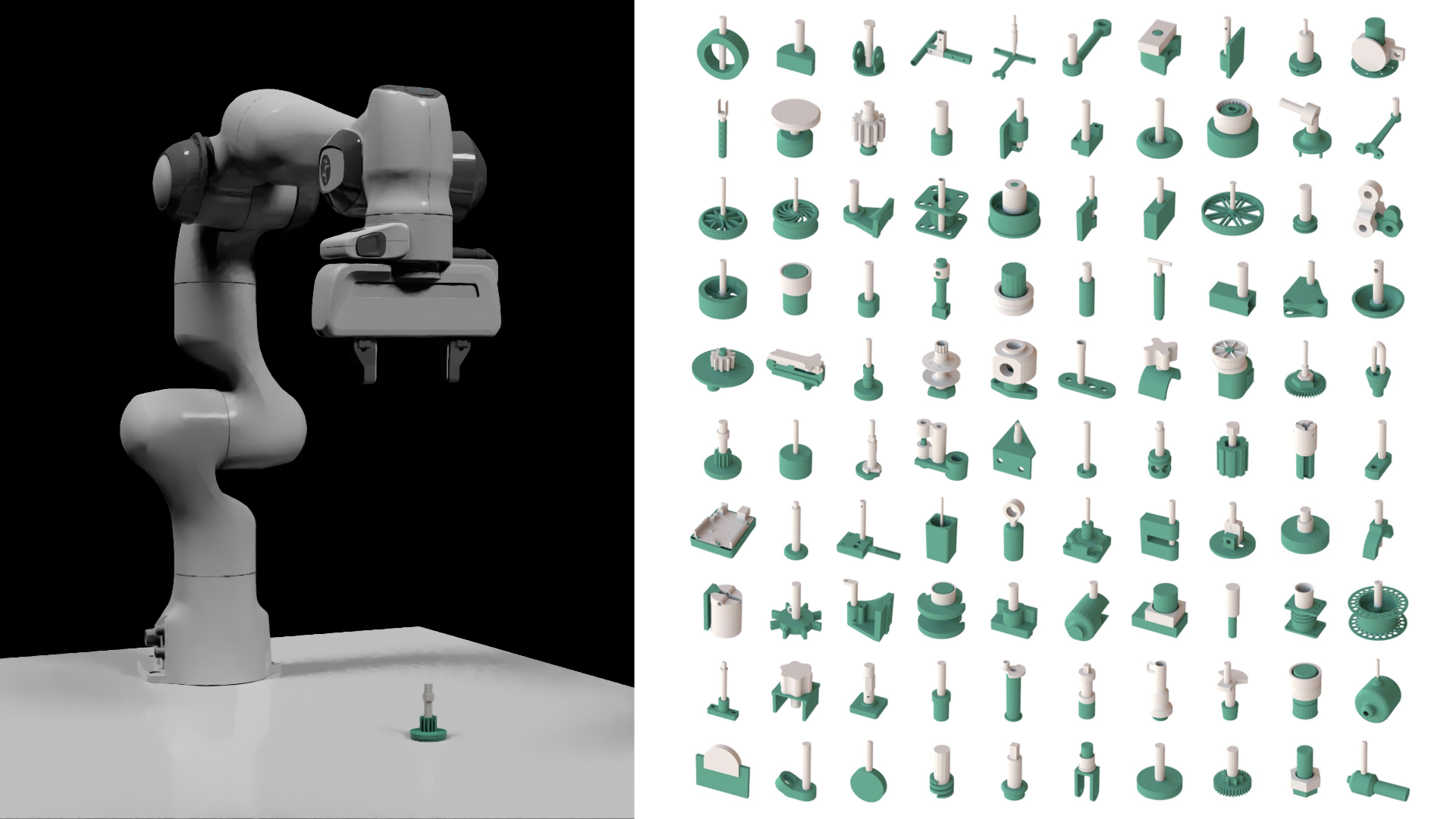
We implemented a simulation-first learning pipeline in the spirit of the AutoMate line of work: parallelized assembly environments, imitation-augmented RL with assembly-by-disassembly demonstrations, imitation terms in the reward, and dynamic time warping for trajectory matching between demonstrations and live motion. We trained specialist policies per assembly family and distilled toward a generalist policy using behavior cloning, DAgger-style refinement, and curriculum reinforcement learning. For deployment, we use a perception-initialized workflow typically wrist RGB-D with 6D pose estimation so policies trained in simulation transfer to hardware without per-task retuning.
Outcome
Specialist policies held strong simulation performance across many assemblies and transferred with only a modest gap on hardware: roughly eighty-six percent mean success on real-world test assemblies, on the order of a few percent below matched simulation runs. Generalist policies remained competitive as well, showing that diverse plug-and-socket-style assembly can be approached with learning and simulation at useful scale.
Technologies
Gallery
Project Media