NavigationROS 2Nav2SLAMPath planningGazebo
ROS 2 autonomous navigation showcase
Nav2-class stacks, maps, and field-style evidence from multiple deployments.
Capabilities
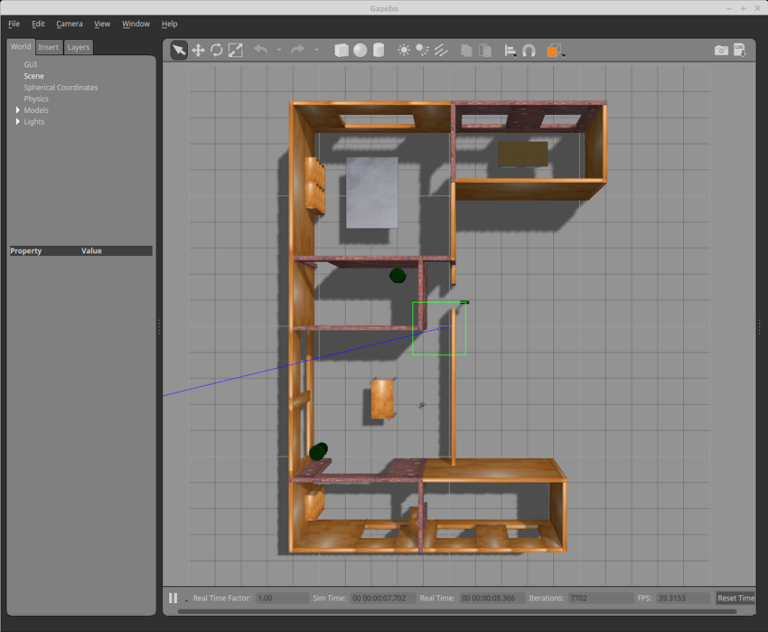
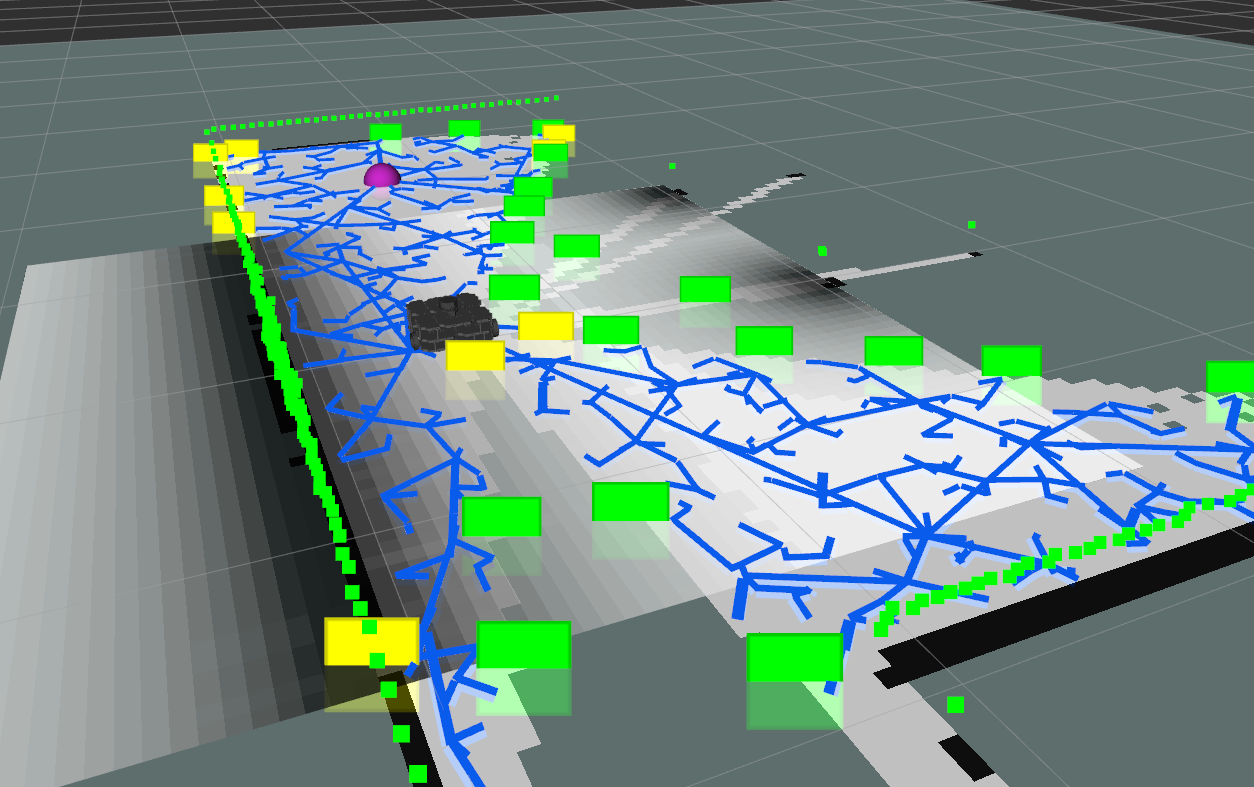
This set highlights autonomous navigation built on ROS 2 and Nav2-class stacks: localization and planning in representative indoor settings, sensor-driven state estimation, and clear visualization of maps, trajectories, and robot state for tuning and stakeholder review.
How we demonstrate it
Delivery is intentionally visual GIFs and stills from multiple runs and robot setups, including route-following behavior, map overlays, and sequential stills that show how the platform moves and how the planner behaves across scenarios.
Highlights
The showcase gives a concise picture of Nav2-class integration and how we iterate with visual evidence from representative environments.
Technologies
ROS 2Nav2SLAMPath planningGazeboSensor fusion
Gallery
Project Media