Robot arm manipulation portfolio
Hardware bring-up, firmware, MoveIt 2, and Omniverse manipulation across industrial and lab arms.
Capabilities
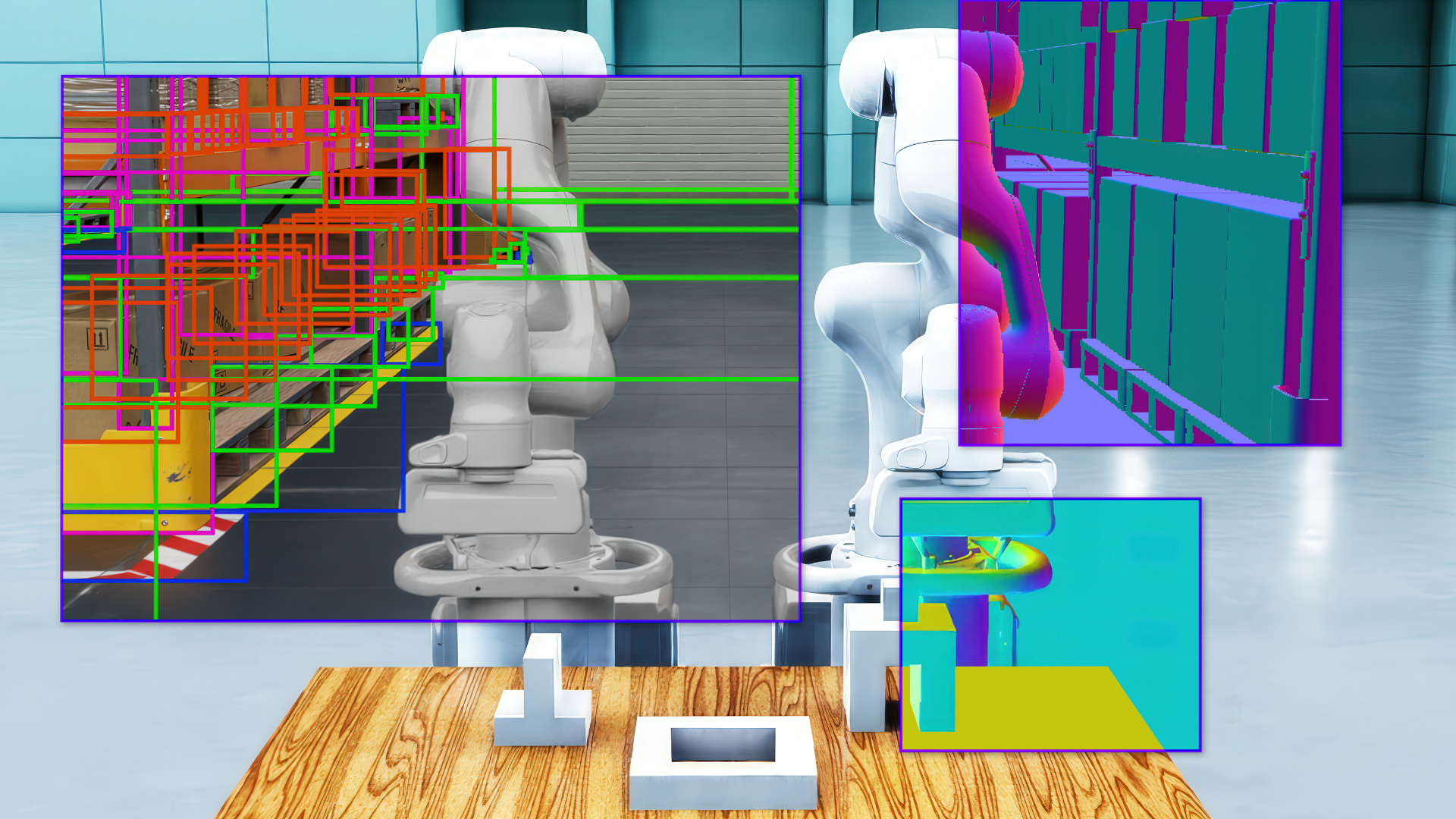
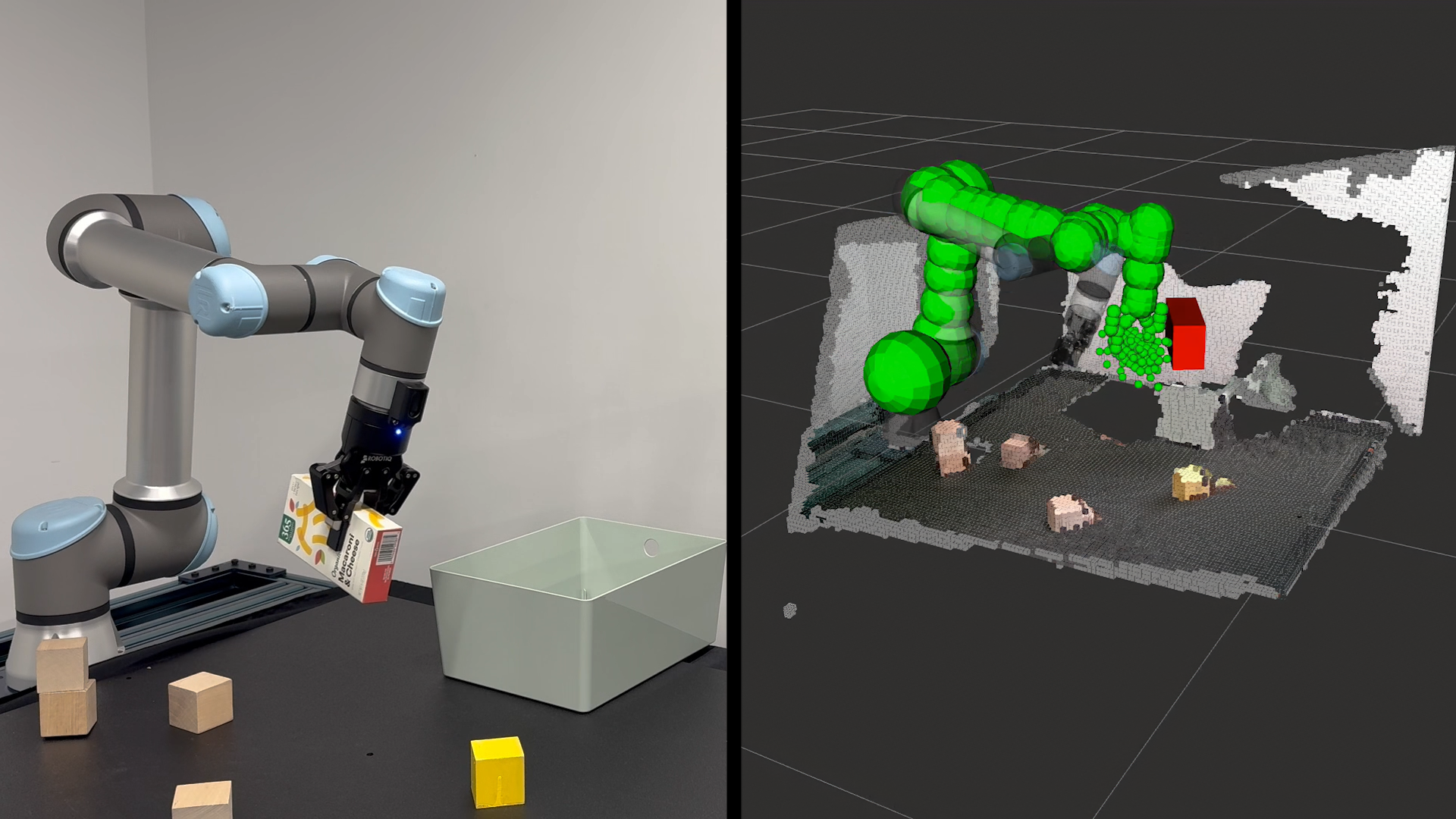
This compilation covers end-to-end arm system engineering: mechanical and electrical bring-up, embedded firmware, ROS 2 motion planning with MoveIt 2, perception-driven pick-and-place, and Omniverse or OpenUSD simulation for manipulation and task prototyping. It also includes fast industrial delta-style motion programming for throughput-sensitive demonstrations.
How we demonstrate it
The media mix is deliberate: simulation feature art, lab videos, and Newton- or Omniverse-related imagery to show breadth from classical industrial arms to accelerated research platforms and high-speed delta motion.
Highlights
The portfolio underscores breadth from firmware and ROS motion to simulation-backed manipulation and high-speed industrial demos.
Technologies
Gallery
Project Media