Industrial gear assembly: Isaac Lab RL with sim-to-real on UR10e
Contact-rich policies for grasp, motion, and insertion trained in Isaac Lab and deployed with Isaac ROS on hardware.
Problem
Industrial assembly depends on sustained, precise contact: grasping, transporting, and inserting parts under uncertainty. Classical fixed automation does not scale cleanly to new parts, while learning-based methods need accurate contact simulation, scalable parallel training, and a deployment path that closes the loop between simulated observations and real vision and torque-controlled hardware.
Solution
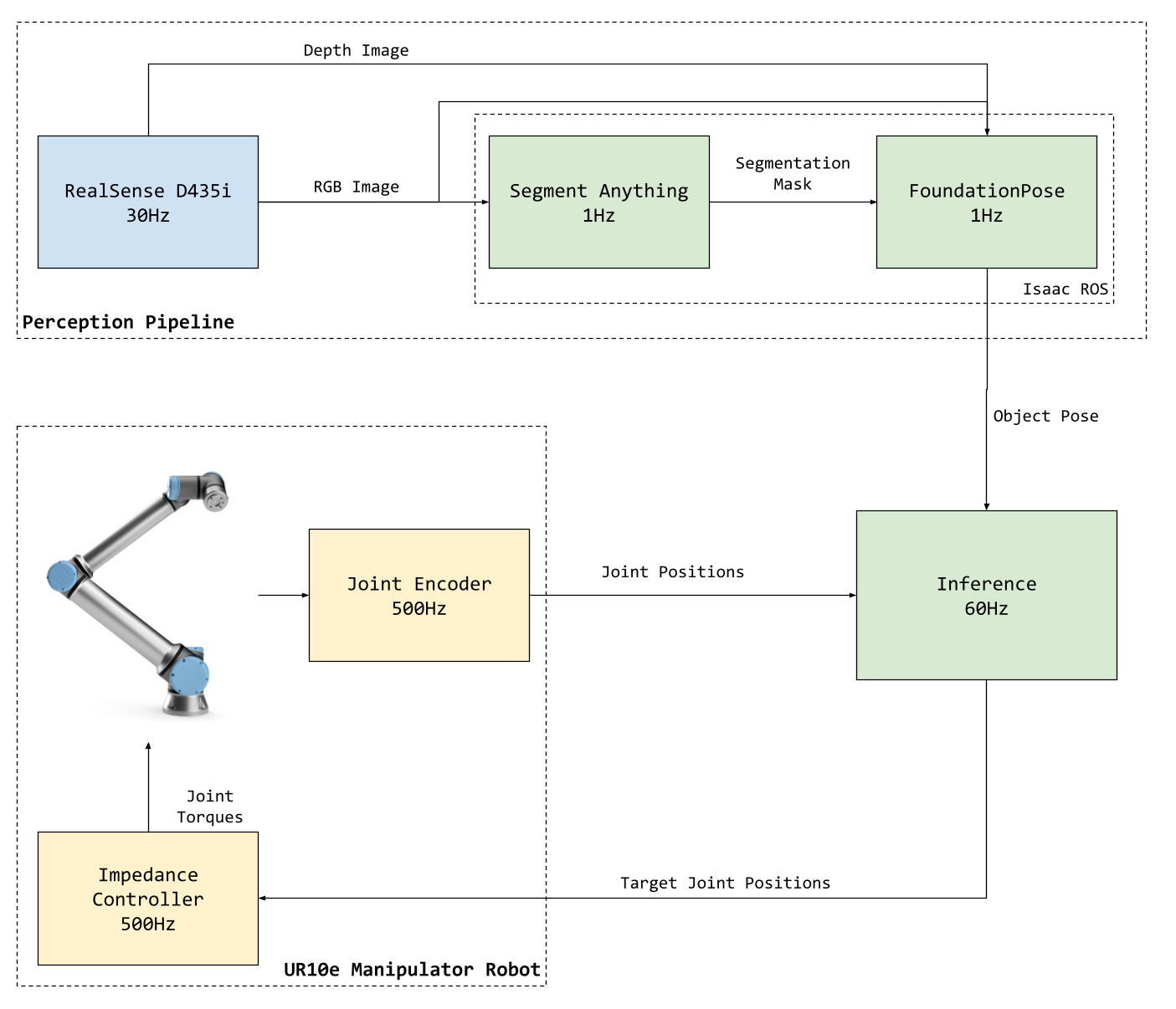
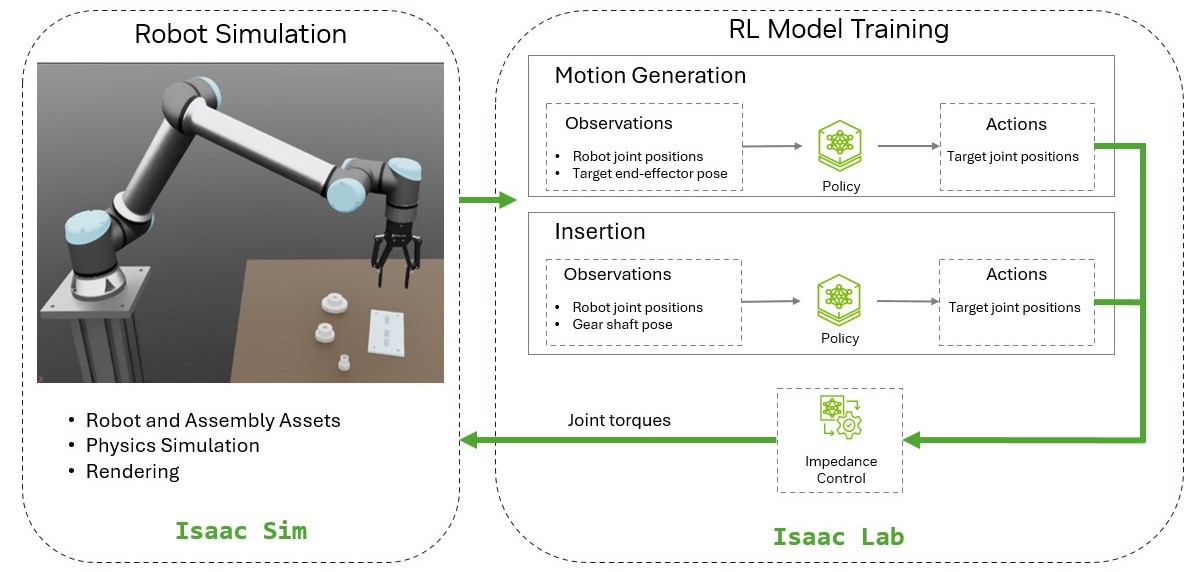
We followed an Isaac Lab and Isaac ROS style workflow for a multi-gear assembly task. Separate reinforcement-learning policies were trained for motion generation and insertion under domain randomization in parallel Isaac Lab environments, with impedance-style control targets at policy frequency. For real deployment on a UR10e, we integrated a perception stack segmentation and 6D pose estimation and executed policies through a low-level impedance or torque interface compatible with the robot’s research-facing control mode, aligning simulated and real observations and actions.
Outcome
Policies trained entirely in simulation compose into a full pick-and-insert sequence for multiple gears, with robustness to assembly order and initial part poses. The work demonstrates practical sim-to-real transfer for contact-rich assembly on industrial hardware without hand-engineered trajectories for every variation.
Technologies
Gallery
Project Media