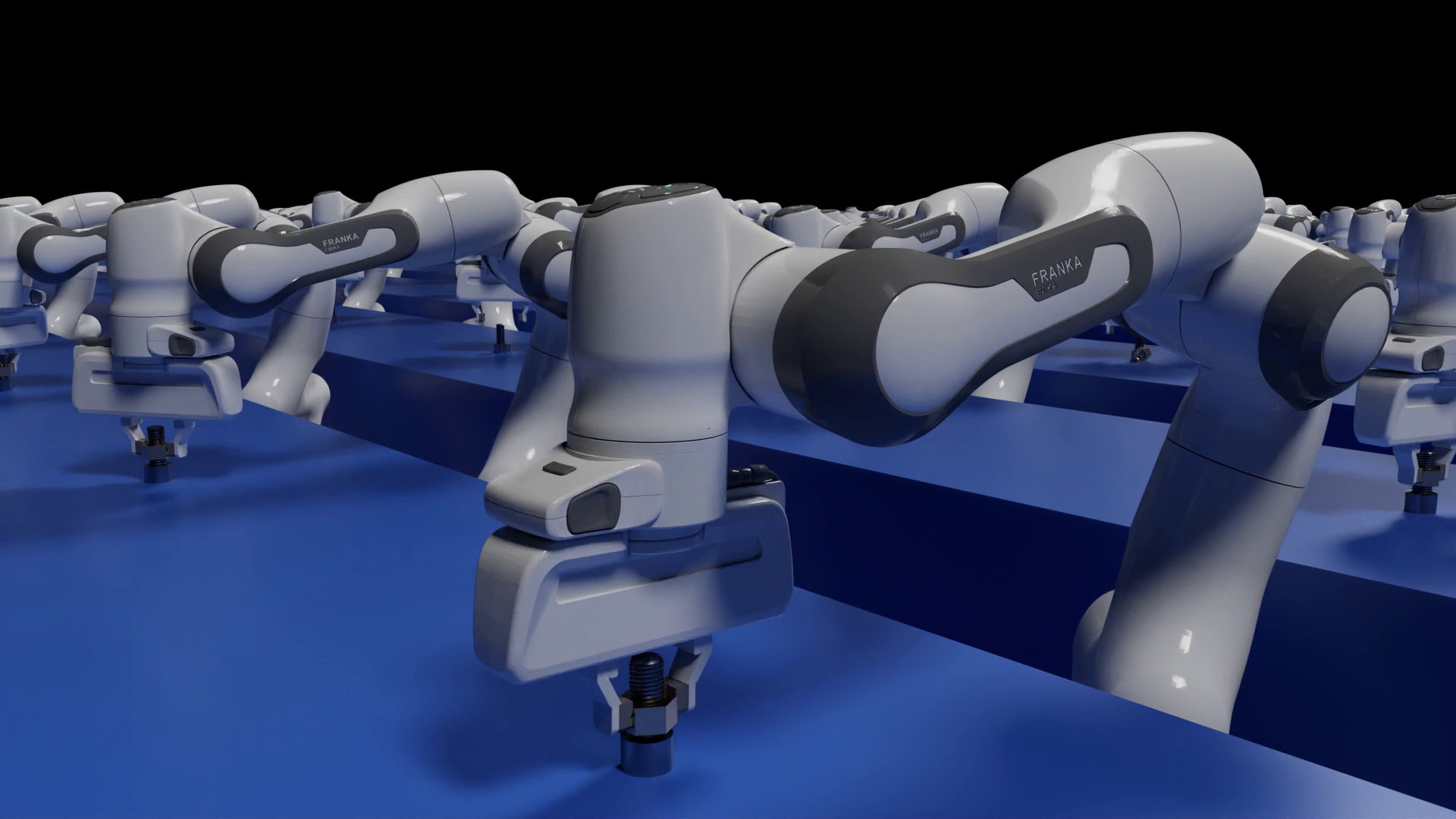
Factory-style nut-and-bolt assembly in Isaac Gym
GPU contact simulation and staged RL for NIST-board threaded fastening at massive parallelism.
Problem
Threaded fastening is a standard contact-rich assembly benchmark, yet many simulators struggle to deliver accurate, real-time contact for threaded geometry at the resolution industrial tasks require. That gap blocks large-scale reinforcement learning, synthetic dataset generation, and repeatable benchmarking for nut-and-bolt and similar fastening tasks.
Solution
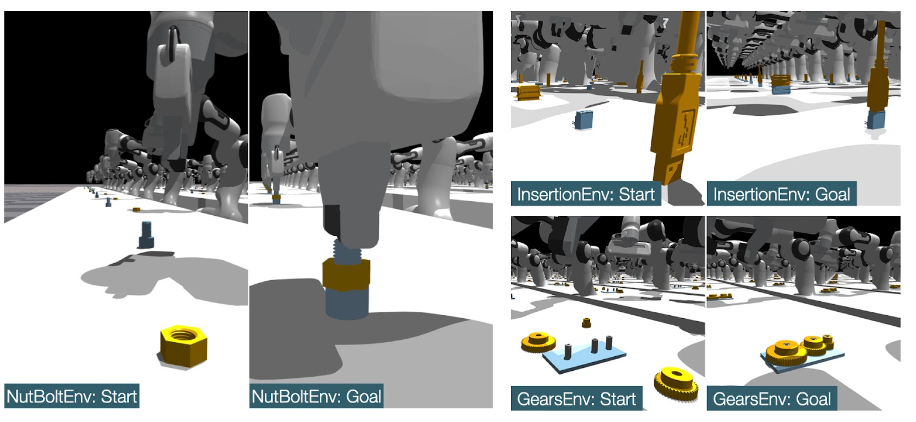
We built and exercised Factory-class environments: GPU signed-distance collisions, contact reduction, and fast solvers that enable large parallel batches of nut-and-bolt interaction. The setup uses simulation-ready NIST Task Board assets, multiple classical controllers, and staged RL sub-policies for pick, place, and screw phases on a Franka-class arm. Where applicable, we compared simulated contact forces to real measurements to sanity-check physical fidelity.
Outcome
The simulator sustains real-time or faster-than-real-time execution at massive parallelism thousands of concurrent interactions while RL on the screw phase reaches high success rates in evaluation. That combination shows contact-rich assembly policies can be trained predominantly in simulation before committing to long hardware iteration cycles.
Technologies
Gallery
Project Media