Blacki mobile manipulator platform
Custom mobile base, dense depth fusion, and vision-guided palletizing built for multi-year R&D.

Problem
Warehouse and logistics automation often requires both mobility and manipulation under a single, consistent world model. Teams need dense geometry for safe motion, reliable obstacle handling, and end-effector intelligence without rebuilding bespoke infrastructure at every facility.
Solution
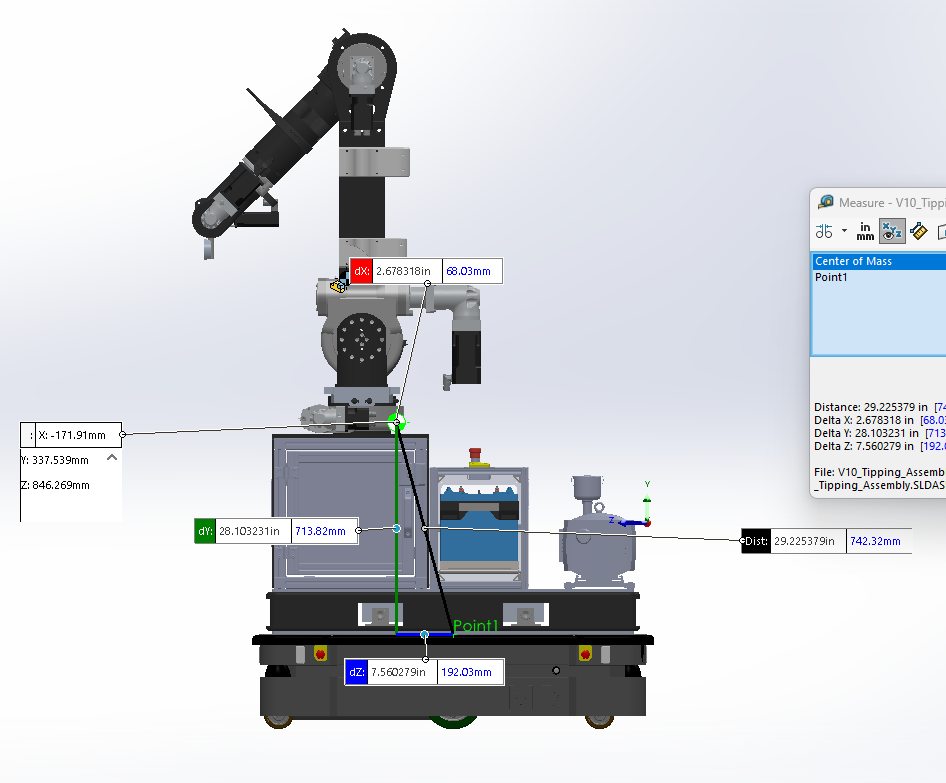
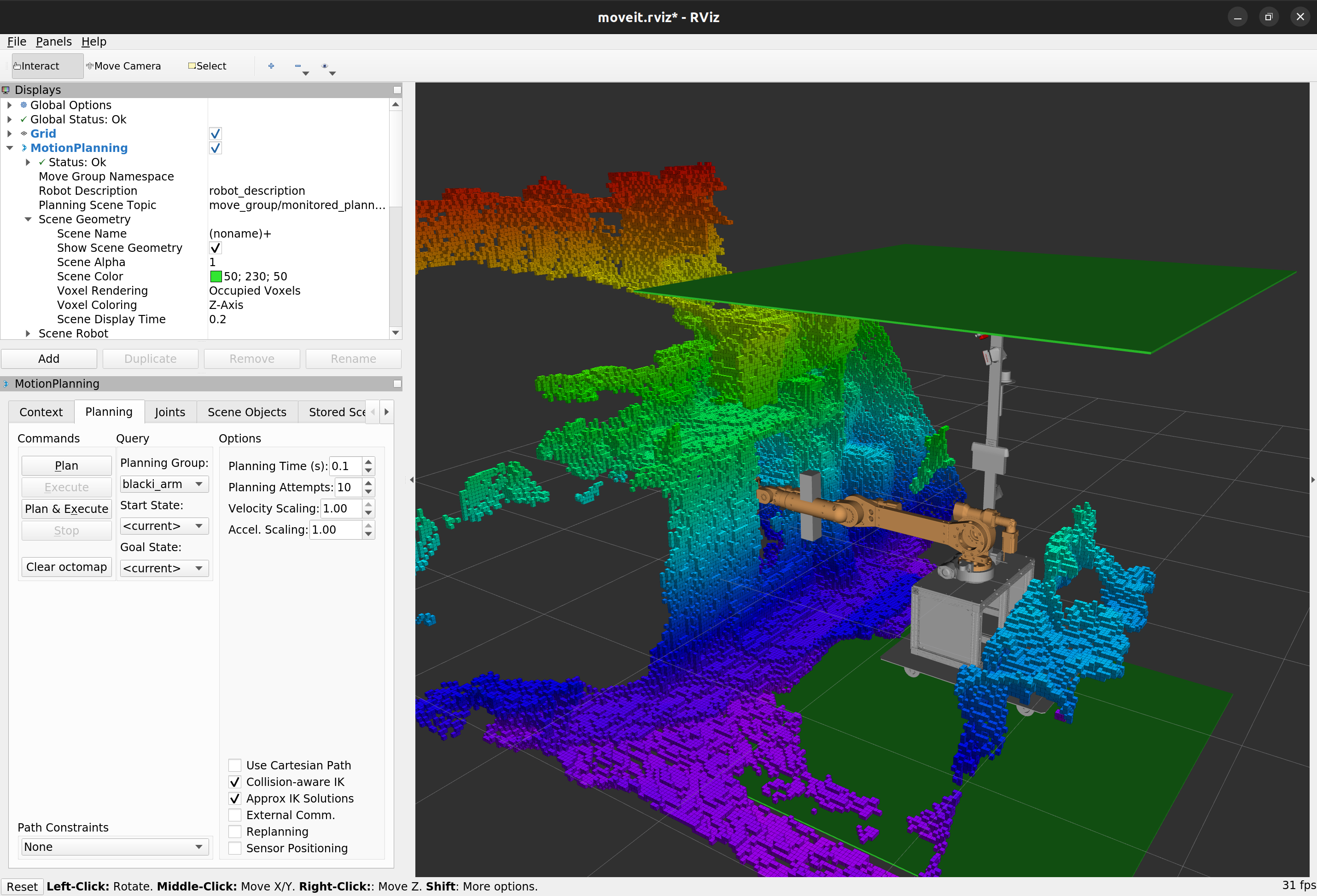
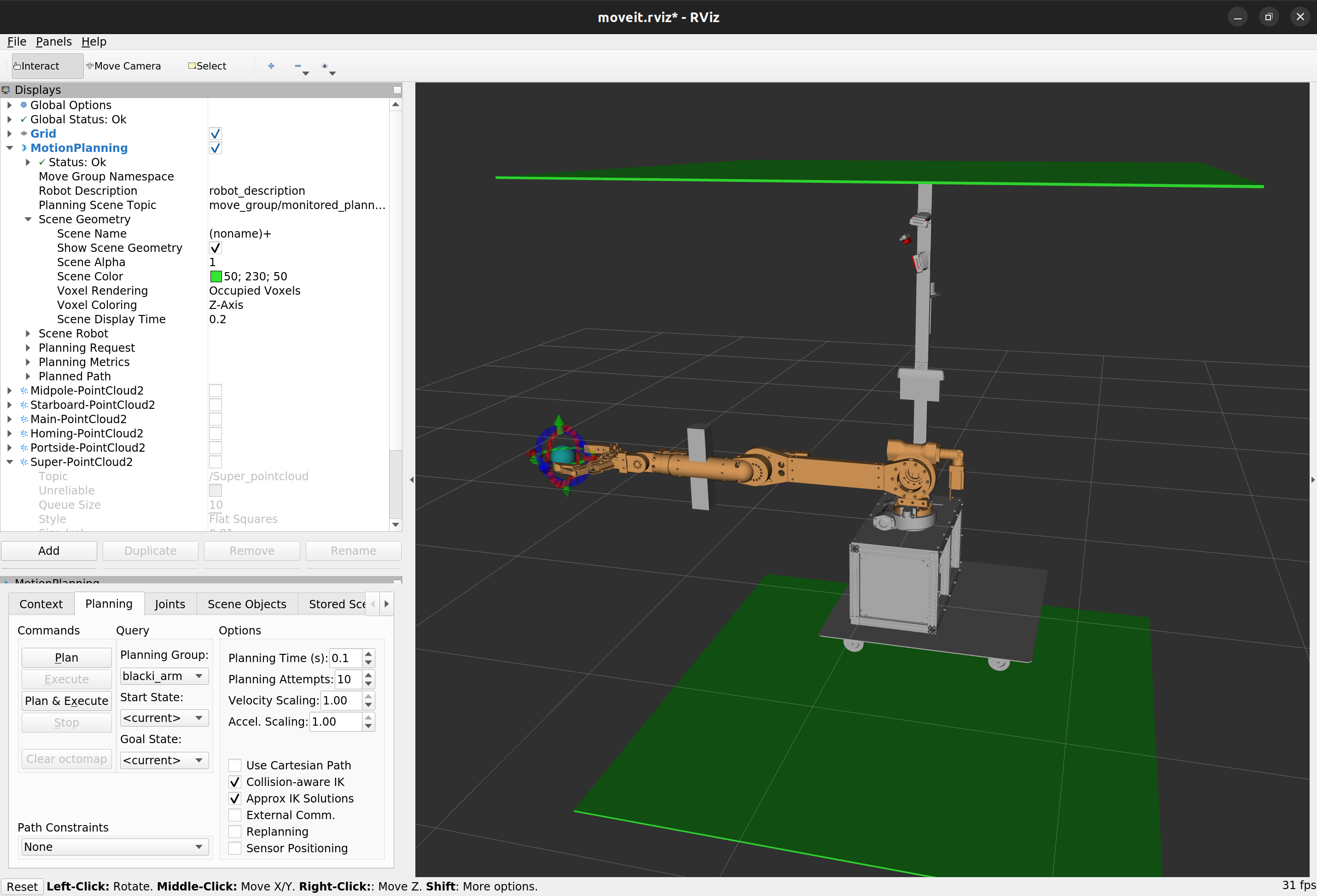
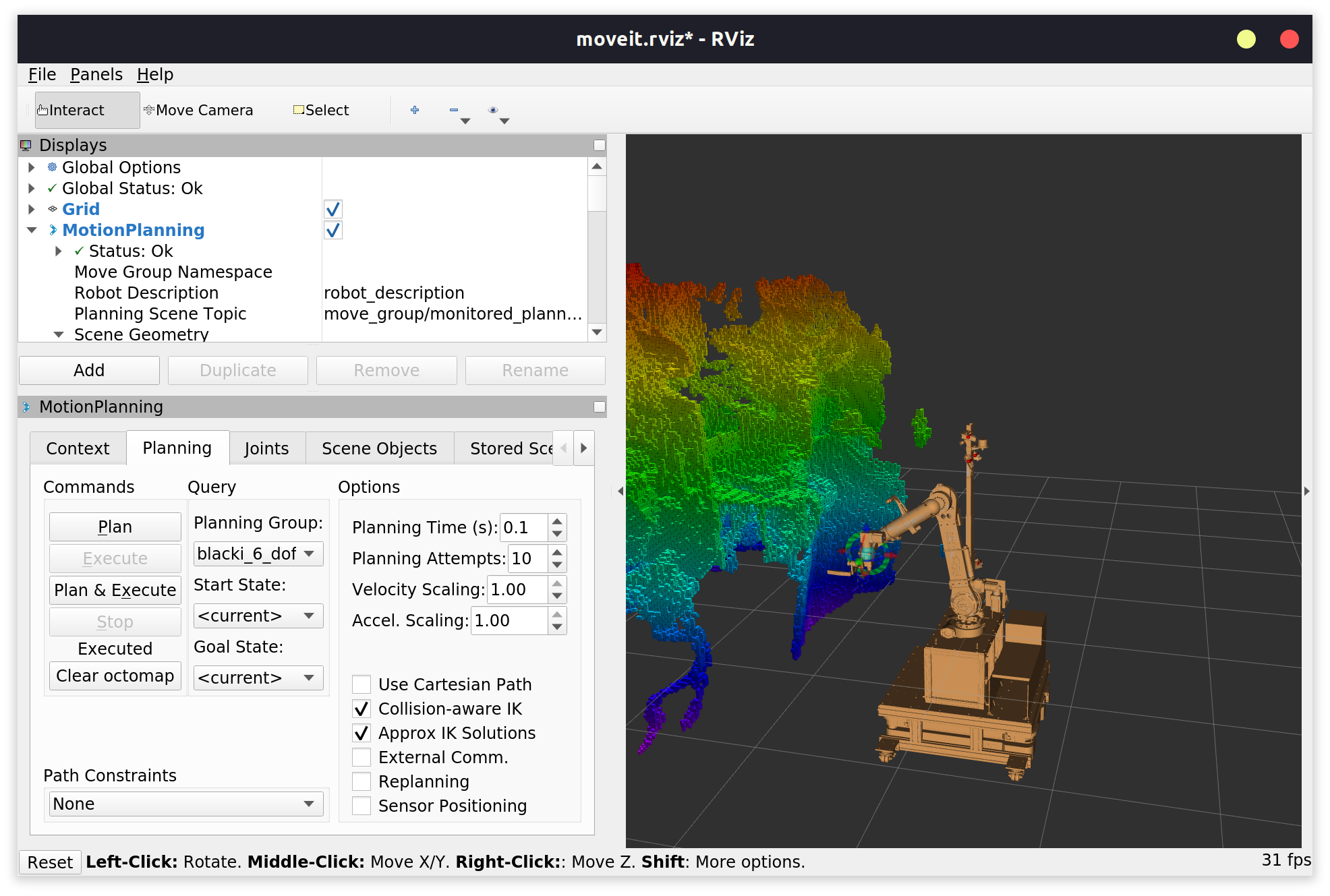
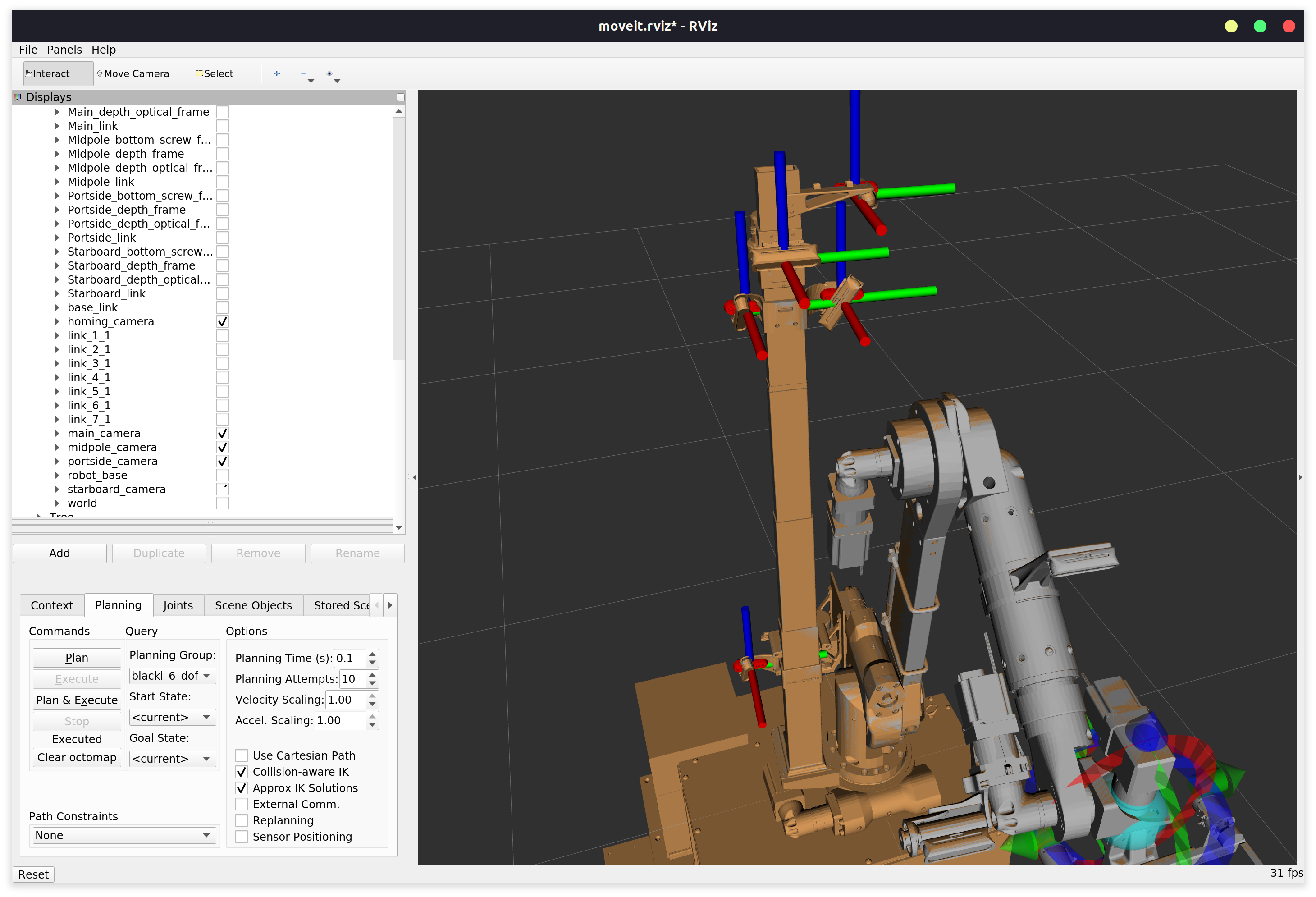
We engineered a long-running R&D platform: a custom mobile robot with a six-degree-of-freedom arm, a multi-camera depth “vision pole,” fused point clouds for environment understanding, dynamic arm planning with obstacle avoidance, and application flows such as palletizing with vision-guided pick and place. The stack integrates perception, planning, and motion into a single architecture suitable for iterative field deployment.
Outcome
The platform has matured over years of continuous development and is positioned for deployment with major logistics and industrial partners. It demonstrates sustained integration of dense mapping, safe motion, and manipulation in real environments rather than one-off demos.
Technologies
Gallery
Project Media