ABB dual-arm gantry: wind turbine blade painting POC
Coordinated ABB arms, ROS 2 / MoveIt 2, and PLC-linked gantry motion for large-envelope painting.
Problem
Painting very large wind-turbine blades requires consistent coverage and smooth end-effector motion across long reaches. The process often combines multiple coordinated robots with a vertical gantry axis driven by shop-floor PLCs, which complicates synchronization, safety, and motion planning.
Solution
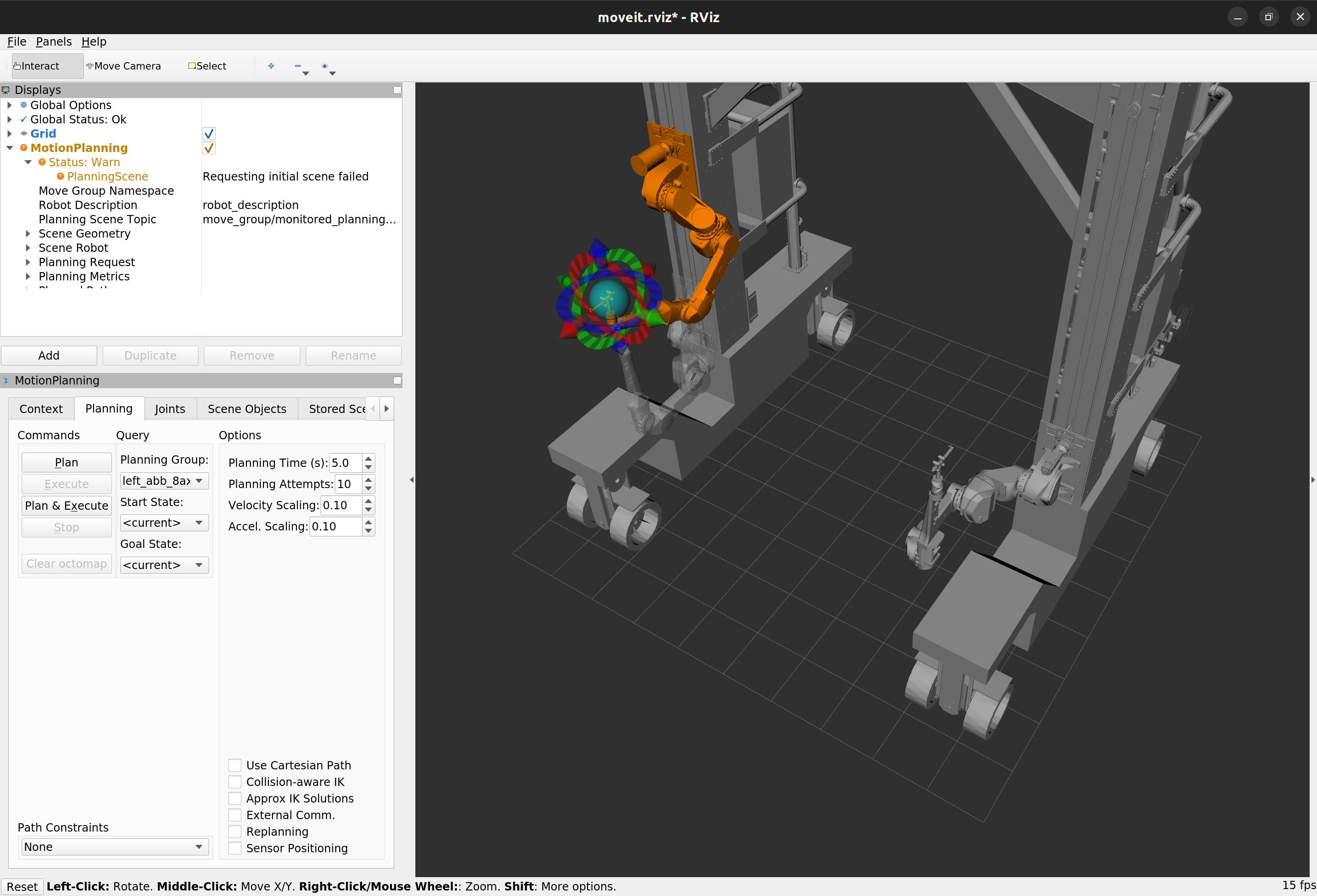
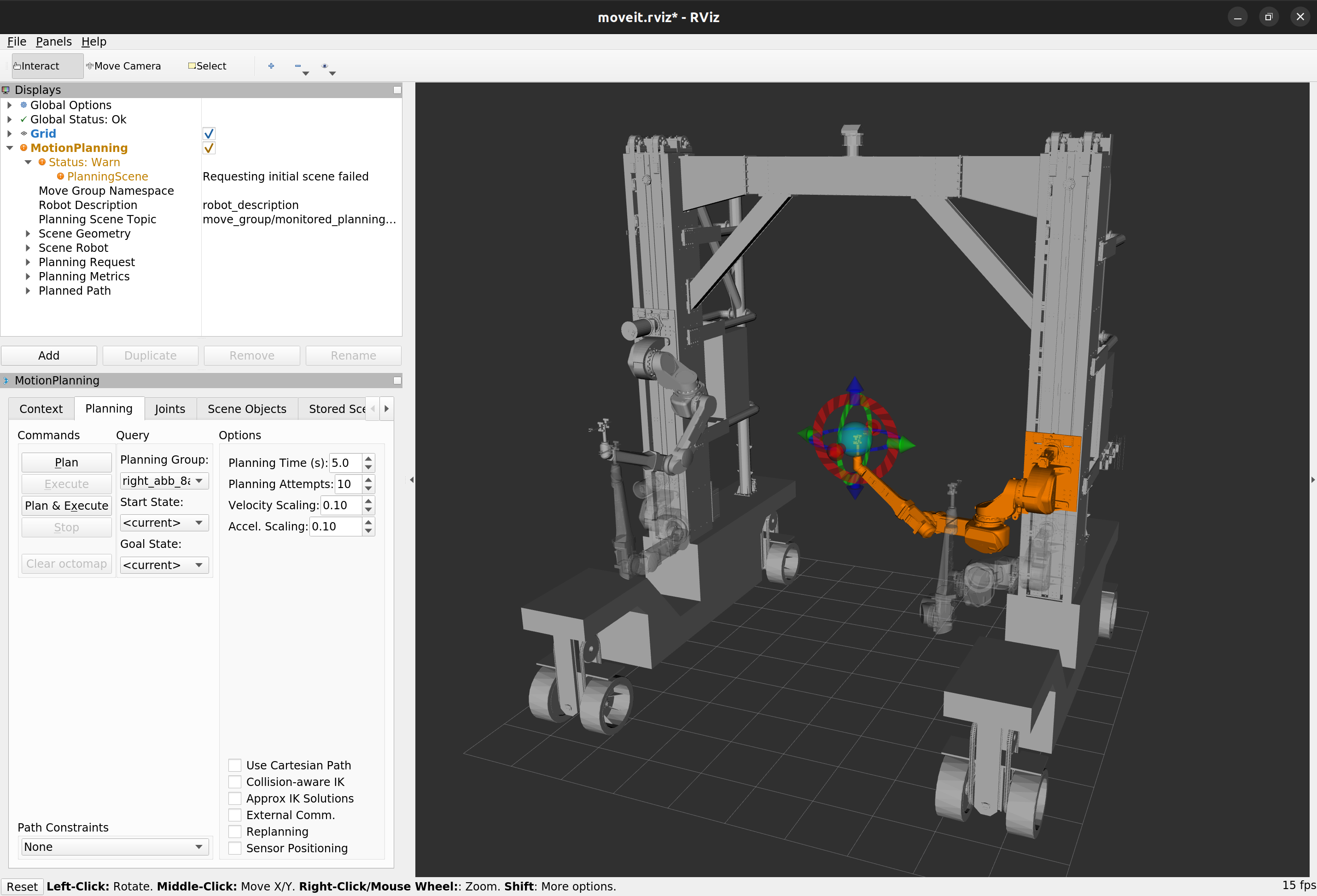
We delivered a real-world proof of concept integrating two ABB arms on a gantry mechanism. The stack includes smooth, constant-velocity end-effector planning, ROS 2 and MoveIt 2 for motion, RAPID coordination for the arms, and PLC-linked control for vertical gantry motion over a large working envelope (on the order of five meters by eighty meters in scope). The goal was synchronized painting trajectories suitable for industrial follow-on.
Outcome
The POC demonstrated stable, repeatable painting motion with coordinated multi-robot control and PLC-backed gantry positioning, with field validation on the target process. It provides a credible path from demonstration to production hardening.
Technologies
Gallery
Project Media