ABB pick & place with perception (Gazebo)
Detection and motion planning in Gazebo before ABB cell deployment.
Problem
Reliable pick-and-place requires tight coupling between detection, grasp selection, and motion planning. Bringing an unproven perception stack straight to a factory ABB cell is risky; simulation-first validation reduces downtime and safety concerns.
Solution
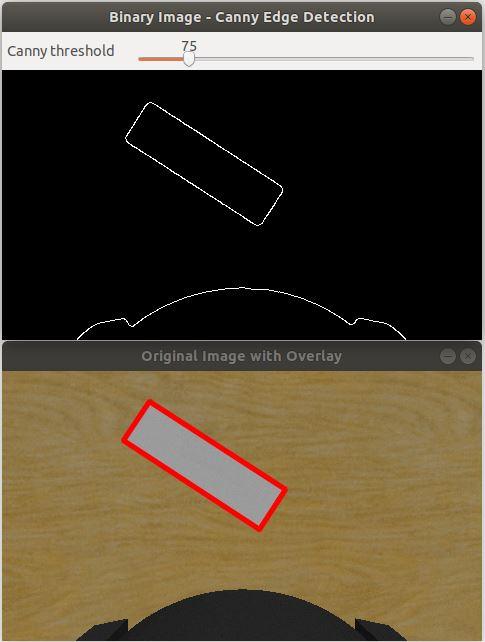
We prototyped object detection and smart pick-and-place behaviors with an ABB industrial arm. Perception and planning loops were validated in Gazebo, with a path toward Vention-style or real-cell integration for hardware bring-up.
Outcome
The work demonstrates an end-to-end pipeline from perception through motion in simulation, forming a solid basis for deployment testing on the physical manipulator, fixtures, and safety-rated operation.
Technologies
Gallery
Project Media